3.2 Global Navigation Satellite Systems
Developed in the early 1970s and fully operational for civil uses since the mid‑1990s, Global Navigation Satellite Systems (GNSS) have been widely used to monitor land movements occurring over large areas caused by earthquakes, tectonic plate motion, and plate boundary deformation. These systems include the United States Global Positioning System, GPS; the Russian Global Navigation Satellite System, GLONASS; and the European Galileo global navigation satellite system. These systems, generally, although wrongly termed “GPS”, consist of earth‑orbiting satellites producing radio signals that can be used to obtain accurate land surface positions. GPS has been operational since 1995 with a constellation of 24 satellites at an average orbit altitude of about 20,000 km, arranged in six orbital planes inclined 55° relative to Earth’s equator. As of October 2017, there were a total of 31 operational satellites in the GPS constellation.
The signals from at least four satellites can be used by an autonomous receiver anywhere on or near the Earth to determine its approximate absolute (that is, non‑differential) position. High precision measurements of crustal movements can be made with differential GNSS by finding the relative displacement between GNSS receivers. Multiple stations situated around an actively deforming area (such as a volcano or fault zone) are used to determine strain and ground movement. Over the last decade, a large number of GNSS tracking stations have been established worldwide. These large over‑national and over‑continental networks are managed by different institutions and consortiums (for example, SOPAC (sopac.ucsd.edu/index.shtml), UNAVCO (www.unavco.org), and EUREF (www.epncb.oma.be)).
GNSS observations collected simultaneously at two receivers (one receiver may be a continuous global positioning system) are used to compute a precise baseline between the receivers. Given the known location of the Continuous GNSS (or base station), the 3‑D position of the roving receiver is determined by adding the observed baseline vector to the known position. Therefore, geodetic networks of reference marks have been established in subsiding zones. They are surveyed and resurveyed by portable GNSS receivers that are temporary placed on the marks, and used as a reference for one or more continuous GNSS stations (C‑GNSS station) located in the area. An example is provided for the Venice region of Italy in Figure 20. One of the first such networks was designed specifically to monitor land subsidence caused by groundwater extraction was established in the Antelope Valley, Mojave Desert, California, USA in 1992 (Ikehara and Phillips, 1994).
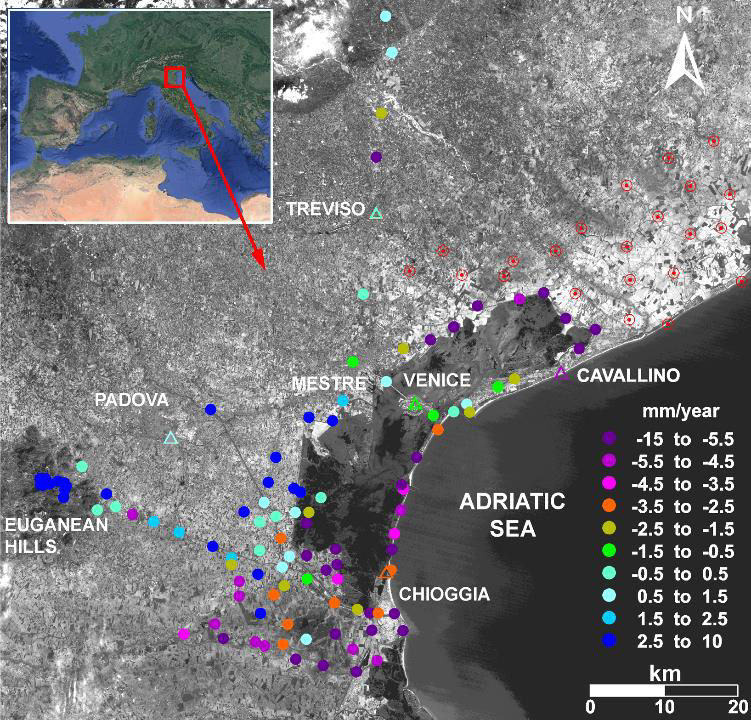
Figure 20 ‑ LANDSAT image of the Venice region (Italy) with the GNSS (circles) and C‑GNSS (triangles) networks. Colors are representative of the displacement rates (mm/year) measured between 1999 and 2003. New GNSS benchmarks added to the network in 2004 are indicated with open red circles (after Teatini et al., 2005).