3.3 Reciprocal Measurements
A reciprocal measurement involves swapping current and voltage electrode pairs (Figure 9). In other words, electrodes A and B are used as potential electrodes while electrodes M and N are used as current electrodes; consequently, Kg remains the same. Theoretically, the reciprocal measurement should yield the same resistance (and hence apparent resistivity) no matter the distribution of conductivity in the ground as the regular measurement provided that (1) no sources are present, (2) there are no effects due to contact resistance, and (3) that Ohm’s law is linear, with any difference in values indicating instrument error and/or effects in violation of Equation 1 or 5. These measurements should be collected to quantify error in measurements and to check for poorly performing quadripoles, which may then be removed. Apparent resistivities generally should match between stacked or reciprocal datasets within a few percent, if not better. Data corresponding to very low applied currents (e.g., < 10 mA or another cutoff), may also be removed if needed.
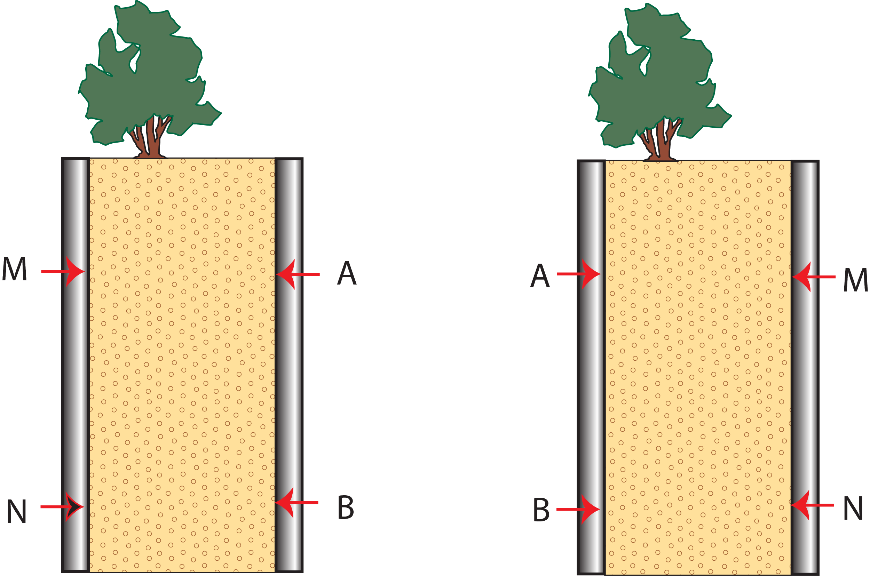
Figure 9 – Reciprocal measurements involve swapping the position of the potential and current electrodes, and can be used to identify problems because the reciprocal measurement will yield the same resistivity as the original measurement unless there is a problem or interference.
Different users evaluate reciprocal measurements in different ways, the most common being reciprocal standard error and reciprocity. If the normal and reciprocal measurements of apparent resistivity are ρa,1 and ρa,2, and the average resistivity is [latex]\rho _{a,ave}=\frac{\rho _{a,1}+\rho _{a,2}}{2}[/latex], the reciprocal standard error srecip and reciprocity r are given by:
| [latex]\displaystyle s_{recip}=\sqrt{\frac{\left [(\rho _{a,1}-\rho _{a,ave})^{2}+(\rho _{a,2}-\rho _{a,ave})^{2} \right ]}{2}}[/latex] | (7) |
and
| [latex]\displaystyle r=\mathrm{abs}\left ( \frac{\rho _{a,1}-\rho _{a,2}}{\rho _{a,ave}} \right )[/latex] | (8) |
Both the reciprocal error and the reciprocity are useful. Reciprocal errors are used to set data weights in the inversion as explained in Section 4.3. The reciprocity is a dimensionless measure of relative error and, when multiplied by 100, gives the percent error in the reciprocal measurement. It is a useful measure of error for data filtering (e.g., reject all data with a reciprocity larger than 0.10) as is shown in the example in the Data Quality Control and Assurance subsection of Section 5.2.
In general, reciprocal errors are larger than stacking errors, and it is commonly thought that reciprocal errors provide a more comprehensive quantification of noise than stacking errors (Binley et al., 1995). For QA/QC, either reciprocity or reciprocal errors may be used instead of, or in addition to, stacking errors. Depending on the array type, reciprocal measurements may take more time than the regular measurements on multi-channel instruments, which, as mentioned earlier, collect multiple potential measurements for each current pair. If n potential measurements are made for a single current pair, then n reciprocal measurements must be made, each with a different current pair. However, a reciprocal survey for a dipole-dipole array will take exactly the same length of time as the regular survey; this is achieved by running the sequence in the reverse direction of the line. A reciprocal survey for a Wenner array will also take exactly the same length of time as the regular survey as each Wenner measurement requires a separate current injection, so the multi-channel functionality cannot be used for this array. The commonly used Schlumberger array type is an example where reciprocals take much longer, but it is also an example where reciprocity can speed up data collection on a multi-channel instrument (i.e., the inverse Schlumberger array). However, arbitrarily designed sequences often take longer to run as reciprocals when multiple current injections in the reciprocal dataset are needed to reciprocate a set of measurements in the regular survey acquired with a single current injection.
A reciprocal measurement should not be collected immediately after its associated regular measurement, as any residual charge up (polarization) of the current electrodes will affect the voltages recorded between these electrodes with the reciprocal measurement. Such effects generally dissipate in a few seconds, although it may take minutes or longer depending on injection. Reciprocal measurements are best collected either interleaved throughout the measurement sequence file or following regular data collection, depending on whether time-lapse processes are being considered and the subsequent time lag between the regular and reciprocal measurement. For investigations of time-varying processes, collecting a subset of data for reciprocals is preferred because otherwise meaningful temporal changes could appear as error. More information on how to use these data to build an error model can be found in the 2017 paper by Lesparre and others.
The principle of reciprocity also applies to IP datasets. Similar to other aspects of IP data acquisition, acquiring reciprocal IP datasets is more challenging than acquiring reciprocal ER datasets. The polarization of a recently used current electrode may severely corrupt the reciprocal IP measurement. IP errors can instead be quantified through analysis of the shape of the decay curves following current shut off (Flores Orozco et al., 2018). However, reciprocation of IP datasets can be done with careful attention to data acquisition to ensure dissipation of IP effects, resulting in significantly improved confidence in IP datasets, which are traditionally susceptible to errors and misinterpretation (Slater and Binley, 2006; Zarif et al., 2017).